
Günümüz eğitim sistemleri, bilginin pasif bir şekilde aktarıldığı geleneksel modellerden, öğrenenin bilgiyi aktif olarak inşa ettiği yapılandırmacı modellere doğru köklü bir dönüşüm geçirmektedir. Bu dönüşüme bilişim teknolojileri eğitimi açısından incelendiğinde merkezde kodlama eğitimi yer almaktadır. Blok tabanlı kodlama, özellikle MIT Media Lab tarafından geliştirilen Scratch ve onun robotik donanımlarla entegre edilmiş türevi olan mBlock, eğitim teknolojileri literatüründe ve saha uygulamalarında merkezi bir konuma yerleşmiştir. Ancak, Blok Tabanlı Kodlama Araçlarının eğitimde bilinçli olarak kullanımı için, akademik ve eleştirel bir bakış açısıyla değerlendirilmesi, aracın sadece ne yaptığına, nasıl öğrettiğine ve hangi eğitimsel temellere dayandığına odaklanmayı gerektirir.
Bu rapor, blok tabanlı kodlama araçlarını ve ilişkili robotik kitlerini, eğitim bilimlerinin en etkili üç kuramsal çerçevesi olan Bilişsel Yapılandırmacılık (Piaget), Sosyal Yapılandırmacılık (Vygotsky) ve Radikal Yapılandırmacılık (Glasersfeld) perspektiflerinden analiz etmeyi amaçlamaktadır. Literatürdeki bulduğum bazı tartışmalar, bulgular ve kuramsal eleştirilerin yardımıyla, blok tabanlı kodlama araçlarının ve bağlantılı robotik araçların öğrenme süreçlerindeki rolü, sunduğu bilişsel fırsatlar ve barındırdığı sınırlılıklar kapsamlı bir şekilde irdelenecektir.
1.1. Kodlama Eğitiminin Tarihsel ve Kuramsal Zemini
Kodlama eğitimi, Seymour Papert’ın 1980’lerde ortaya koyduğu Constructionism (İnşacılık) teorisiyle pedagojik bir zemin kazanmıştır. Papert, bilginin en iyi, inşa ederken oluştuğunu savunmuştur (1991). Blok tabanlı kodlama araçları çocukların soyut algoritmik kavramları (döngüler, koşullu ifadeler, değişkenler) somut bloklar aracılığıyla zihinlerinde inşa etmelerine olanak tanır. Ancak bu süreç, basit bir yap-boz oyunundan öte, eğitimsel birçok süreci içinde barındırır. Bilgi, dışsal bir gerçekliğin temsili midir, yoksa bireyin deneyim dünyasında işleyen işe yarar ve geçerlilik kazanan bir temsil midir? Bu soru, raporun ilerleyen bölümlerinde Radikal Yapılandırmacılık ekseninde detaylandırılacaktır (Atilla vd., 2023; Ming vd., 2025).
1.2. Raporun Kapsamı
Bu çalışma, Blok tabanlı kodlama araçlarını sadece bir yazılım aracı olarak değil, bir öğrenme ortamı olarak ele almaktadır. Analiz üç yapılandırmacılık kuramı üzerinden kurgulanmıştır:
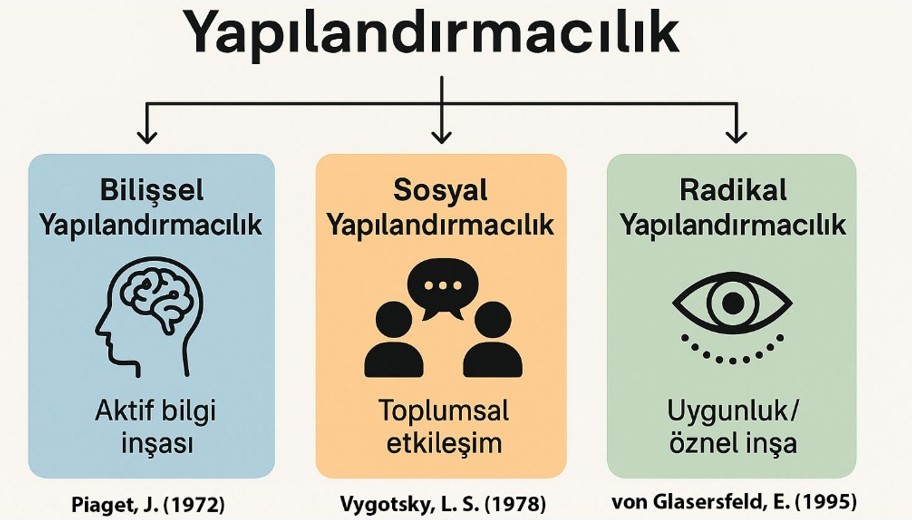
- Bilişsel yapılandırmacılık: Bireysel zihinsel şemaların oluşumu, özümseme ve uyumsama süreçleri.
- Sosyal yapılandırmacılık: Akran etkileşimi, işbirlikli öğrenme, kültür ve dilin rolü.
- Radikal yapılandırmacılık: Bilginin öznelliği, gerçeklik algısı ve blok kodlama araçları ile yapılan etkileşimlerin doğası.
Rapor boyunca, literatürden elde edilen bulgular eleştirel bir süzgeçten geçirilerek blok kodlama araçlarının sınıf içi uygulamalarındaki başarıları ve başarısızlıkları; özellikle öğrenci tutumları, görüşleri ve bazı teknik sorunların pedagojik etkileri de tartışılacaktır.
2. Bilişsel Yapılandırmacılık ve Blok Kodlama Araçları
Jean Piaget’nin Bilişsel Yapılandırmacılık kuramı, öğrenmeyi bireyin zihnindeki bilgi yapılarını (şemaları) aktif olarak oluşturduğu içsel bir süreç olarak tanımlar. Bu süreçte iki temel mekanizma işler: Özümseme, yani yeni bilginin mevcut şemalara uydurulması ve Uyumsama, yani mevcut şemaların yeni bilgiye göre değiştirilmesi.Blok kodlama araçları, bu bilişsel süreçleri tetiklemek ve desteklemek üzere tasarlanmış güçlü araçlardır (Akgün & Akgün, 2024).
2.1. Somut İşlemlerden Soyut İşlemlere Geçiş Aracı Olarak Bloklar
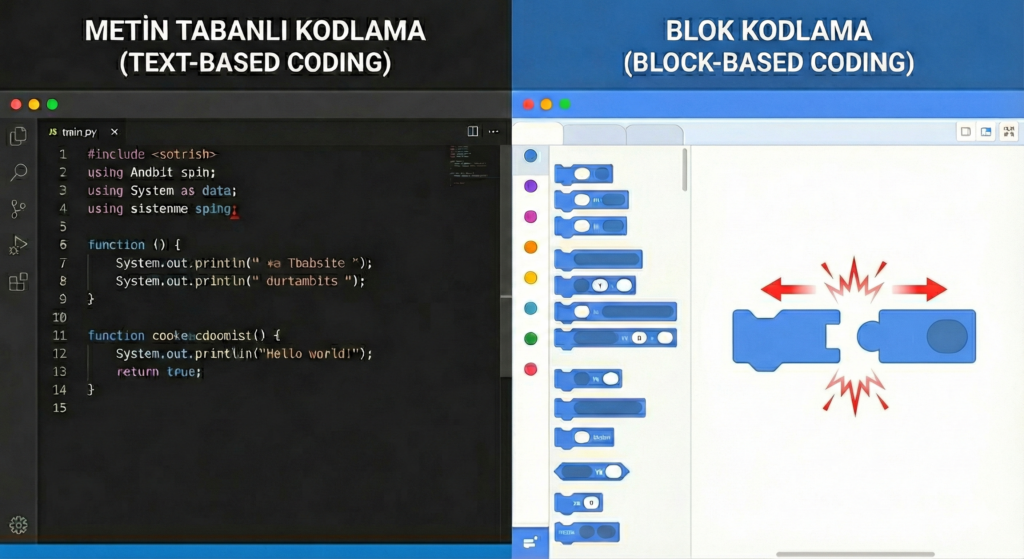
Piaget’nin bilişsel gelişim evrelerine göre, Blok kodlama araçları, hedef kitlesi olan ilköğretim ve ortaöğretim çağı çocukları, genellikle somut işlemler döneminden soyut işlemler dönemine geçiş aşamasındadır. Bu evredeki çocuklar, mantıksal işlemleri yapabilirler ancak bu işlemlerin somut nesnelerle desteklenmesine ihtiyaç duyarlar. Geleneksel metin tabanlı programlama dilleri (Python, C++ vb.), soyut sözdizimi kuralları ve görünmez mantıksal yapılar gerektirdiğinden, bu yaş grubu için bilişsel yükü aşırı artırabilir (Kim vd., 2023)
Blok kodlama araçları, bu sorunu görsel sembollerle çözer. Programlama komutları, renkli ve birbirine geçmeli bloklar (LEGO parçaları gibi) olarak sunulur (Weintrop & Wilensky, 2015).
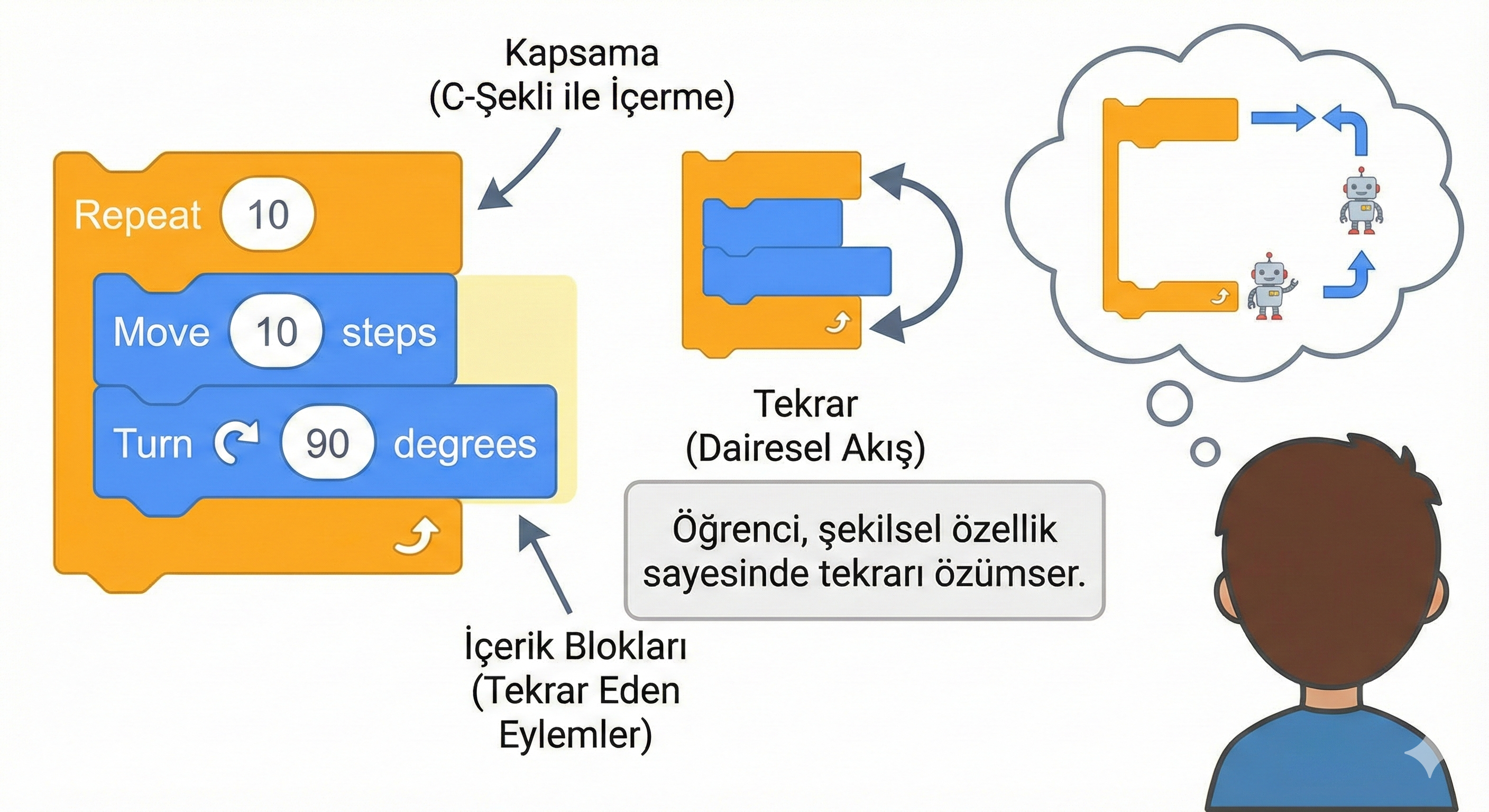
- Şekilsel İpuçları: Bir döngü bloğu, içine diğer blokları alacak şekilde “C” harfi formundadır. Bu görsel yapı, “kapsama” ve “tekrar” kavramına benzeşir ve kavram anlamlandırmasını somutlaştırır. Öğrenci, döngünün içine koyduğu blokların tekrar edeceğini, şekilsel özellik sayesinde özümser (Numanoğlu & Keser, 2017)
- Hata Engelleyiciler: Metin tabanlı kodlamada bir noktalı virgülün eksikliği programın çalışmasını engellerken, Blok kodlama araçlarında uyumsuz bloklar birbirine yapışmaz. Bu, öğrencinin dikkatini sözdizimi hatası aramak yerine algoritma mantığını kurmaya odaklar (Ming vd., 2025; Priambodo vd., 2023)
Literatürde yapılan çalışmalar, blok tabanlı ortamların öğrencilerin derse olan ilgisini artırdığını ve programlama tutumlarını olumlu etkilediğini göstermektedir(Cetin & Otu, 2023) Ancak, bazı araştırmalar, bu görsel kolaylığın öğrencileri yüzeysel öğrenmeye itebileceği ve karmaşık kavramların (örneğin değişkenler veya iç içe döngüler) derinlemesine anlaşılmasını engelleyebileceği konusunda uyarmaktadır (Grover & Basu, 2017)
2.2. Bilişsel Çatışma ve Hata Ayıklamanın Bağlantısı
Piaget’ye göre öğrenmenin gerçekleşmesi için bireyin bilişsel çatışma yaşaması gerekir. Yani, mevcut bilgi şemasının karşılaşılan yeni durumu açıklayamaması ve zihinsel bir çatışma oluşması durumudur. Robotik kodlama, bu dengesizliği yaratmak için iyi bir ortam sunar (Schallert vd., 2010). Örneğin, bir öğrenci mBot robotunu “1 saniye ileri git ve sağa dön” şeklinde kodladığında, zihnindeki şema robotun tam 90 derece döneceğini varsayar. Ancak kodun tam olarak bu düşünceyi yansıtmaması, fiziksel dünyada ise pil seviyesi, zemin sürtünmesi veya motor gücü farklılıkları nedeniyle robot 80 derece veya 100 derece dönebilir.
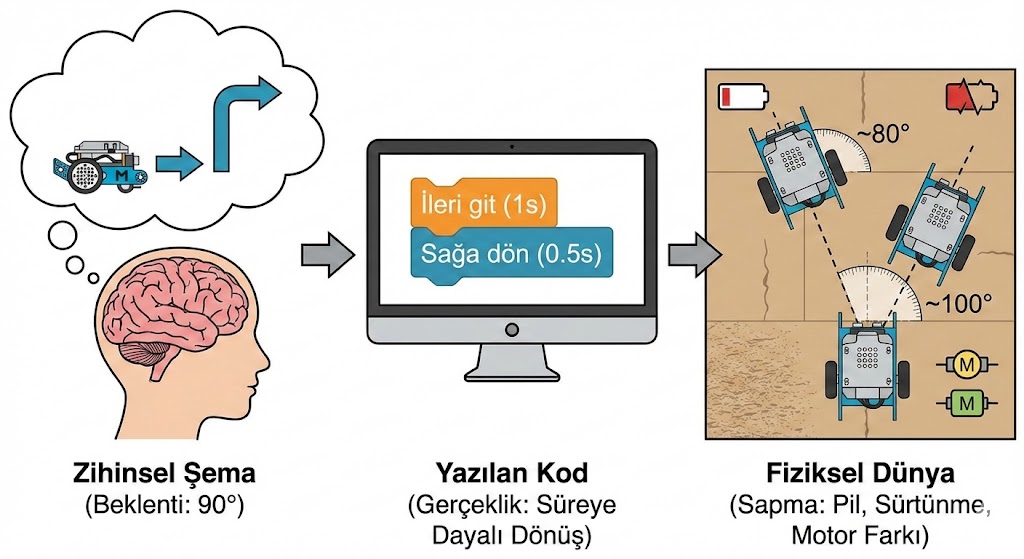
Bu an, bilişsel yapılandırmacılık açısından kritik bir öğrenme anıdır. Öğrenci, kodu yazdığında doğru şekilde çalışacak şeklinde zihninde var olan şemasını terk ederek, kodunun ve robotunun çevresel faktörlerle farklı tepkiler vereceği şeklinde daha karmaşık bir şemaya uyumsama yapmak zorundadır. Araştırmalar, bu tür hataların (debug süreçlerinin), öğrencilerin problem çözme ve eleştirel düşünme becerilerini, sadece ekranda çalışan kodlara göre daha fazla geliştirdiğini vurgulamaktadır (Sullivan, 2008). mBlock’un Canlı Mod özelliği, öğrencilerin kodu değiştirmeden sensör değerlerini anlık olarak görmelerini sağlayarak, bu dengesizlik sürecini yönetmelerine ve zihinsel süreçleriyle gerçekleşen durum arasındaki farkı test etmelerine yardımcı olur.
2.3. Kavram Yanılgıları ve Bilişsel Engeller
Literatür incelendiğinde, Blok kodlama araçlarını içeren ortamlarda öğrencilerin sıkça yaşadığı bazı kavram yanılgıları göze çarpmaktadır. Grover ve Basu (2017) gibi araştırmacılar, görsel blokların bazen kavramların gerçek anlamlarına ulaşılmasını gölgelediğini belirtmektedir.
Blok kodlama ortamlarının sunduğu görsel temsiller ile öğrencilerin zihinsel modelleri arasındaki uyuşmazlıklar, yapılandırmacı müdahaleler gerektiren pedagojik fırsatlar sunmaktadır. Örneğin, turuncu veri bloklarıyla temsil edilen değişkenlerin dinamik doğasının kavranamama sorunu, değerin değişimini somutlaştıran görsel izleyicilerle çözümlenebilir. Döngülerdeki sonsuz akış yanılgısı ise, sistemin çalışma hızının yapay olarak yavaşlatılması ve öğrencinin her bir tekrarı ayrık bir olay olarak gözlemlemesiyle düzeltilebilir. Ayrıca koşul yapılarındaki ‘kontrol etme’ ve ‘bekleme’ eylemleri arasındaki farkın anlaşılması, öğrencinin fiziksel dünya ile etkileşime girdiği sensör temelli etkinliklerle mümkündür. Bu bağlamda, bilişsel yanılgıların giderilmesinde kodun sadece yazılması değil, çalışma anındaki davranışının görsel ve fiziksel dönütlerle desteklenmesi, bilginin aktif olarak yapılandırılması açısından kritiktir.
Bu yanılgılar, aracın kendisinden ziyade, rehberlik eksikliğinden kaynaklanabilir. Bilişsel yapılandırmacılık, blok kodlama araçlarının öğrenciye sunulmasının tek başına yeterli olmadığını, öğrencinin bu materyalle aktif bir zihinsel mücadeleye girmesi gerektiğini savunur.
3. Sosyal Yapılandırmacılık ve Blok Kodlama Araçları
Vygotsky’nin Sosyal Yapılandırmacılık kuramı, bilişsel gelişimin sosyal etkileşimlerden ve kültürel araçlardan (dil, semboller, teknoloji) bağımsız olamayacağını savunur (1978). Blok kodlama araçları bu açıdan bir işbirliği platformu olarak işlev görür.
3.1. Yakınsak Gelişim Alanı ve İskele Kurma
Vygotsky’nin en bilinen kavramı olan Yakınsak Gelişim Alanı (ZPD), öğrencinin tek başına yapabildikleri ile bir rehber veya daha yetkin bir akran yardımıyla yapabilecekleri arasındaki mesafeyi ifade eder (Bruner, 1985). Blok kodlama araçları, arayüz tasarımıyla teknik bir iskele sağlar.

Blok kodlama araçları, en basit haliyle, hiçbir kodlama bilgisi olmayan bir çocuğun bile blokları sürükleyip bırakarak çalışan bir program (örneğin robotu hareket ettirme) yapmasına olanak tanır. Bu, öğrenciyi yakınsak gelişim alanına dahil eder. Uygulama, yapay zekâ eklentileri, Nesnelerin İnterneti uygulamaları ve Python’a geçiş özellikleri ile ileri düzey kullanıcılar için de alan açar.
Ancak literatürdeki eleştiriler, bu iskelenin bazen çok güçlü olabileceğini ve öğrencinin yardımsız yapabilme aşamasına geçişini geciktirebileceğini öne sürmektedir. Kirschner, Sweller ve Clark (2006), yapılandırmacı yaklaşımlardaki minimal rehberlik ilkesinin, acemi öğrenciler için bilişsel yükü artırarak öğrenmeyi engelleyebileceğini savunur. Bu yüzden blok tabanlı kodlama araçlarının kullanımı sırasında öğretmenin veya yapılandırılmış yönergelerin rolü hayati önem taşır. Tamamen serbest bir keşfetme süreci yerine, hedefleri belirlenmiş ve giderek azalan destekle sunulan bir müfredat, yakınsak gelişim alanı içinde kalmayı sağlar.
3.2. İşbirlikli Öğrenme ve İşbirlikli Programlama
Robotik ve kodlama eğitimi doğası gereği işbirliklidir. Çoğu sınıfta her öğrenciye bir robot düşmez, bu da öğrencilerin gruplar halinde çalışmasını zorunlu kılar. Sosyal yapılandırmacılık açısından bu bir avantajdır. İki öğrenci bir mBot üzerinde çalışırken, kodlama eylemi sosyal bir sürece dönüşür.

- Sürücü ve Gözlemci: Bir öğrenci bilgisayarı kullanırken, diğeri strateji geliştirir ve hataları kontrol eder. Bu rol değişimi, Vygotsky’nin bahsettiği üstbilişsel becerilerin gelişmesini sağlar. Öğrenciler birbirlerine “Neden bu bloğu koydun?”, “Robot neden durmadı?” gibi sorular sorarak birbirlerinin düşünme süreçlerini görünür kılarlar (Ming vd., 2025).
- Dilin Rolü: Kodlama blokları üzerindeki doğal dil ifadeleri (örn. “Saniyede 10 adım git”), teknik jargonu azaltarak öğrencilerin kendi aralarında ve öğretmenle ortak bir dil oluşturmasını kolaylaştırır (Weintrop & Wilensky, 2015). Bu, Vygotsky’nin dilin düşünceyi şekillendirdiği teziyle örtüşür; Blok kodlama dili, öğrencilerin problem çözme süreçlerini algoritmik bir sıraya sokmalarına yardımcı olur.
3.3. Maker Kültürü ve Topluluk Öğrenmesi
mBlock, Scratch gibi blok kodlama araçlarının ortak paylaşım platformları bulunmaktadır. Bu topluluk yaptıklarını paylaşarak maker kültürünü sürdürür. Öğrenciler, başkalarının projelerini indirip, kodlarını inceleyip, kendi ihtiyaçlarına göre değiştirebilirler. Bu durum, bilginin ortaklaşa inşa edildiği sosyal yapılandırmacılığın dijital bir çeşidi olarak yorumlanabilir. Ancak, eğitimciler burada bir riskin farkında olmalıdır. Örneğin öğrenci, başkasının yazdığı karmaşık bir çizgi izleyen robot kodunu indirip mBot’a yüklerse ve robot çalışırsa, bu bir başarı olarak görülmez. Çünkü buradaki durum öğrencinin öğrendiği anlamına gelmez. Vygotsky’e göre öğrenme, öğrencinin o kültürel aracı yani kodları içselleştirmesi ile gerçekleşir. Sadece kullanmak, öğrenmek değildir (Weigend, 2019) Bu tarz durumlarda, öğretmenin öğrenciden kodu satır satır açıklamasını istemesi, kopyalamayı tespit edeceği ve süreci öğrenmeye dönüştüren kritik müdahaledir.
4. Radikal Yapılandırmacılık ve Blok Kodlama Araçları
Radikal yapılandırmacılık kuramı, bilginin nesnel gerçekliğin bir temsili olduğu fikrini reddeder. Bunun yerine, bilginin bireyin deneyim dünyasında işleyen öznel bir yapı olduğunu savunur (Walshe, 2020) Bilgi doğru veya yanlış değildir; hedefe ulaşmada işe yarar veya yaramaz. Blok kodlama araçları ile robotik kodlama, bu felsefi duruşu test etmek için güzel bir seçenektir.
4.1. Geleneksel Doğruluk Yerine Yaşayabilirlik
Yaşayabilirlik kavramı; kişinin deneyimleriyle örtüşen ve bireyin amaçladığı bir işlevi yerine getiren herhangi bir zihinsel ya da fiziksel eylemdir. Geleneksel eğitim anlayışında, bir matematik probleminin tek bir doğru cevabı vardır. Ancak robotikte, bir görevi (örn. labirentten çıkış) başaran sonsuz sayıda kod kombinasyonu olabilir. Radikal yapılandırmacılıkta önemli olan, öğrencinin kurduğu zihinsel modelin, karşılaştığı engelleri aşarak hedefe ulaşıp ulaşmadığıdır (Hardy, 1997).

- Örnek Senaryo: Bir öğrenci mBot’un siyah çizgiyi izlemesi için bir algoritma geliştirir.
- Model A: “Siyahı görünce sağa dön, beyazı görünce sola dön.” (Basit zikzak).
- Model B: “Siyahı görünce dur, etrafı tara, çizginin yönünü bul.” (Karmaşık arama).
- Değerlendirme: Von Glasersfeld’e göre Model B, Model A’dan “daha doğru” değildir. Eğer pist basitse ve zaman kısıtı yoksa, Model A tamamen yaşayabilir bir bilgidir. Ancak pistte keskin virajlar varsa ve hız önemliyse, Model A yaşayabilirliğini yitirir ve öğrenci yeni bir model inşa etmek zorunda kalır.
Bu yaklaşım, bilgiye bakış açısını değiştirmeyi gerektirir. Öğretmen, öğrencinin koduna yanlış demek yerine, “Bu kod şu koşullarda çalışıyor, peki ya zemin değişirse?” diyerek öğrencinin zihninde kurduğu öznel modelinin sınırlarını zorlamalıdır.
4.2. Fiziksel Gerçeklik ve Sensörlerin Çalışma Mantığındaki Belirsizlik Durumu
Radikal yapılandırmacılık, dış dünyadaki gerçekliğe (gerçekten orada olan şeye) doğrudan erişemeyeceğimizi, sadece duyularımız aracılığıyla algıladığımız kadarıyla bir gerçeklik inşa ettiğimizi söyler (Walshe, 2020). Robotik eğitiminde bu durum şu şekilde benzerlik gösterir. mBot’un ultrasonik sensörü önümde engel var demez; ses dalgasının dönüş süresini ölçer ve elektriksel bir sinyal üretir. mBlock arayüzü bu gerçeklikle ilgili bilgi vermez. Örneğin; Mesafe < 10 bloğu, sensörün gürültülü verisini dijital bir sayıya indirger. Öğrenci, sensörün bazen kumaş yüzeylerden yansımadığını veya açısal olarak yanıldığını gördüğünde, robotun bozuk olduğunu düşünebilir. Oysa radikal yapılandırmacı bir bakış açısıyla öğrenciye robotun bozuk olmadığı, onun zihnindeki “sensör her şeyi mükemmel görür” şeklindeki zihinsel modelin bu gerçekliğe uymadığı öğretilmelidir (Schallert vd., 2010).

Sensör verilerindeki bu belirsizlik ve tutarsızlık, öğretmen tarafından doğru şekilde aktarılırsa öğrenciyi mutlak gerçeklik arayışından, değişen durumlara uyarlanabilir sistemler tasarlamaya evirir. Öğrenci, sensörden gelen hatalı verileri filtrelemek için ortalama alma, koşullu ifadeler kullanma gibi stratejiler geliştirdiğinde, aslında Glasersfeld’in bahsettiği uyum sağlama sürecini gerçekleştirmektedir.
5. Blok Kodlama Araçlarının Eleştirel Değerlendirmesi
Literatür, yukarıda kuramsal değerlendirmelerde de bahsedildiği gibi blok kodlama araçlarının kullanımında karşılaşılan bazı temel sorunlara ve pedagojik risklere dikkat çekmektedir:
- Bloktan Metne Geçiş Sorunu: Weintrop ve Wilensky (2015) gibi araştırmacılar, öğrencilerin blok tabanlı kodlamada yetkinleşseler bile, metin tabanlı kodlamaya geçtiklerinde zorlandıklarını belirtmektedir. Öğrenciler blokların şekillerine o kadar alışırlar ki, metin tabanlı dillerin soyut yapısı onlara tamamen yabancı gelir. mBlock’un sağ tarafta Python kodunu göstermesi her zaman kavramsal transferi garanti etmez; öğrenciler genellikle bu pencereye bakmazlar.
- Yüzeysel Öğrenme: Bazı öğrenciler, ne yaptığını anlamadan rastgele blokları birleştirip deneme-yanılma yöntemiyle çalışan bir kod elde edebilirler. Bu durum, derinlemesine şema oluşumunu engeller. Öğrenci herhangi bir işe yarayan koda sahiptir ama neden çalıştığını bilmez. Bu, yapılandırmacılığın anlamlı öğrenme hedefiyle çelişir (Grover & Basu, 2017).
- Teknik Yetersizlikler ve Araç Bağımlılığı: Blok kodlama araçları, belirli bir düşünme biçimi mantığıyla çalışır. Bu yapı, sıralı düşünme şeklinde ilerler. Ancak ilerleyen süreçlerde öğrencinin öğrenmek isteyeceği bir başka programlama mantığı olan nesne yönelimli düşünme biçimlerinin gelişimini sınırlayabilir. Ayrıca, donanım bağımlılığı (mBot, Arduino) maliyet ve erişilebilirlik sorunları yaratarak dijital uçurumu derinleştirebilir (Talan, 2021).
- Bilişsel Yük Eleştirisi: Kirschner ve arkadaşlarının (2006) belirttiği gibi, tamamen yapılandırmacı, rehbersiz bir keşif süreci, özellikle karmaşık robotik projelerde öğrencilerin kaybolmasına ve yanlış öğrenmelerine neden olabilir. Bluetooth bağlantısı kurmak gibi konu dışı bilişsel yükler, asıl öğrenme hedefini gölgeleyebilir.
6. Sonuç ve Öneriler
Yapılan bu literatür destekli inceleme sonucunda, Blok kodlama araçlarının ve robotik kitlerinin, yapılandırmacı öğrenme kuramları açısından güçlü bir potansiyele sahip olduğu, ancak bu potansiyelin gerçekleşmesinin bilinçli öğretim tasarımına bağlı olduğu görülmektedir. Bilişsel açıdan, Blok kodlama araçları, gerçek kodlamaya giden yolda öğrencilere güvenli bir ilk basamak sunar. Piaget’nin somut işlemler dönemindeki çocukların mantıksal yapıları içselleştirmesine yardımcı olur. Sosyal açıdan, sınıf içinde zengin bir etkileşim ve işbirliği ortamı yaratır, akran öğrenimini destekler. Radikal açıdan, öğrenciyi mutlak doğrulardan ziyade, değişken koşullara uyum sağlayan çözümler üretmeye teşvik ederek, gerçek dünyaya hazırlar.
Eğitimcilere ve program geliştiricilere yönelik şu öneriler sunulabilir:
- Rehberli Keşif: Tamamen serbest bırakmak yerine, öğrencilere yapılandırılmış, zorluk derecesi kademeli artan görevler verilmelidir.
- Metne Geçiş Stratejileri: Blok kodlama araçları kullanılırken, blokların arkasındaki Python/C++ kodları aktif olarak derste incelenmeli, blok ve metin arasındaki anlamsal köprüler açıkça kurulmalıdır.
- Hata Kültürü Oluşturma: Robotun düzgün çalışmaması, sensör hataları veya bağlantı sorunları başarısızlık olarak değil, analiz edilmesi gereken durumlar olarak sunulmalıdır. Öğretmen, “Neden çalışmadı?” sorusuyla radikal yapılandırmacı sorgulamayı tetiklemelidir.
- Kavramsal Derinlik: Öğrencilerin sadece çalışan kod yazmaları değil, yazdıkları kodun mantığını akış şemalarıyla veya sözel olarak açıklamaları istenerek, kavramsal yanılgıların önüne geçilmelidir.
Sonuç olarak blok kodlama araçları, doğru pedagojiyle, çocukları sadece kod yazan değil, düşünen, sorgulayan, işbirliği yapan ve belirsizlikle başa çıkabilen bireyler olarak yetiştirmek için etkili bir eğitim ortamıdır.
Kaynakça
Akgün, M., & Akgün, İ. H. (2024). The Effect of Educational Robotic Applications on Academic Achievement: A Meta-Analytic and Meta-Thematic Study. Base for Electronic Educational Sciences, 5(2), 74-96. https://doi.org/10.29329/BEDU.2024.1064.5
ATİLA, G., ŞAHİN, D., & SALAR, R. (2023). Ortaokul Öğrencilerinin Temel Düzey Robotik Kodlama Eğitimi Hakkında Görüşleri. Ulusal Eğitim Akademisi Dergisi, 7(2), 124-143. https://doi.org/10.32960/uead.1264523
Bruner, J. S. (1985). Vygotsky A Historical and Conceptual Perspective. In J. Wertsh (Ed.), Culture, Communication, and Cognition Vygotskian Perspectives. Cambridge Cambridge University Press. – References – Scientific Research Publishing. (t.y.). Geliş tarihi 14 Aralık 2025, gönderen https://www.scirp.org/reference/referencespapers?referenceid=1416340
Cetin, I., & Otu, T. (2023). The Effect of the Modality on Students’ Computational Thinking, Programming Attitude, and Programming Achievement. International Journal of Computer Science Education in Schools, 6(2). https://doi.org/10.21585/ijcses.v6i2.170
Grover, S., & Basu, S. (2017). Measuring student learning in introductory block-based programming: Examining misconceptions of loops, variables, and Boolean logic. Proceedings of the Conference on Integrating Technology into Computer Science Education, ITiCSE, 267-272. https://doi.org/10.1145/3017680.3017723
Hardy, M. D. (1997). Von Glaserfeld‘s Radical Constructivism: A Critical Review. Science & Education, 6(1-2), 135-150. https://doi.org/10.1023/A:1008664626705
Kim, Y., Kim, J., & Lee, W. (2023). Effect of Block-Based Python Programming Environment on Programming Learning. Applied Sciences (Switzerland), 13(19). https://doi.org/10.3390/APP131910898
Kirschner, P. A., Sweller, J., & Clark, R. E. (2006). Why Minimal Guidance During Instruction Does Not Work: An Analysis of the Failure of Constructivist, Discovery, Problem-Based, Experiential, and Inquiry-Based Teaching.
Ming, G., Rafidah Syariff Fuad, D. M., Lester Junior Lee, H., Roziah Muhamed Yaacob, Y., & Ng Wei Kang, T. (2025). INTERNATIONAL JOURNAL OF RESEARCH AND INNOVATION IN SOCIAL SCIENCE (IJRISS) Creative Learning Unplugged: A Constructionist Approach to Coding Education Using Scratch. https://doi.org/10.47772/IJRISS
Numanoğlu, M., & Keser, H. (2017). Programlama Öğretiminde Robot Kullanımı – Mbot Örneği. Bartın Üniversitesi Eğitim Fakültesi Dergisi, 497-497. https://doi.org/10.14686/buefad.306198
Papert, S., & Harel, I. (1991). Centro Latinoamericano para la Competitividad y el Desarrollo Sostenible Situating Constructionism 1.
Priambodo, W., Nugroho, K., & Hadiono, K. (2023). Impact of mBlock Interface Design on Student Interest and Motivation in Primary School Robotics A Case Study in Indonesia. International Journal of Scientific Research in Computer Science and Engineering, 11(4), 1-7. https://doi.org/10.26438/IJSRCSE/V11I4.17
Schallert, D. L., Reuben McDaniel, C.-S. R., Edmund Emmer Gary D Borich Anna E Maloch, C.-S. T., Michelle Jordan, by, Music Ed, B., & Music, M. (2010). Managing Uncertainty in Collaborative Robotics Engineering Projects: The Influence of Task Structure and Peer Interaction Committee: Managing Uncertainty in Collaborative Robotics Engineering Projects: The Influence of Task Structure and Peer Interaction.
Sullivan, F. R. (2008). Robotics and science literacy: Thinking skills, science process skills and systems understanding. Journal of Research in Science Teaching, 45(3), 373-394. https://doi.org/10.1002/TEA.20238
Talan, T. (2021). The Effect of Educational Robotic Applications on Academic Achievement: A Meta-Analysis Study. International Journal of Technology in Education and Science, 5(4), 512-526. https://doi.org/10.46328/IJTES.242
Vygotsky, L. S., Cole, M., John-Steiner, V., Scribner, S., & Souberman, E. (1978). Mind in society: The development of higher psychological processes. L. S. Vygotsky. Mind in society: The development of higher psychological processes. L. S. Vygotsky., 159, xi, 159-xi. https://psycnet.apa.org/record/1979-28227-000
Walshe, G. (2020). Radical Constructivism—von Glasersfeld (ss. 359-371). https://doi.org/10.1007/978-3-030-43620-9_24
Weigend, M. (2019). Learning Environments with Scratch. Constructivist Foundations 14(3): 377-379, 2019, 14(3), 377-379. https://constructivist.info/14/3/377
Weintrop, D., & Wilensky, U. (2015). To block or not to block, that is the question. Proceedings of the 14th International Conference on Interaction Design and Children, 199-208. https://doi.org/10.1145/2771839.2771860